Tutorial sobre Relé por CDU¶
Os procedimentos apresentados a seguir visam ilustrar o processo da modelagem de relés usando a interface de Controladores Definidos pelo Usuário.
O caso apresentado se encontra dentro do exemplo 26 – RELE_CDU da pasta de Exemplos distribuída juntamente com a instalação do programa. Neste caso, há quatro relés modelados como exemplo ilustrativo do recurso:
901 – Relé de Sobrecorrente para linha;
902 – Relé de Sub/Sobrefrequência para grupo gerador;
903 – Relé de Sobretensão para elemento shunt;
904 – Relé diferencial para linha.
O objetivo deste tutorial é ilustrar a lógica da construção do relé diferencial para linha , a partir de uma única definição de uma excitatriz, aplicar essa Topologia em 4 máquinas diferentes do sistema, sem precisar replicar o código do CDU.
Modelo de relé diferencial para linha
A função principal do relé diferencial está em detectar curtos nas linhas e extingui-los pela abertura das extremidades do circuito. Essa avaliação é feita considerando a diferença entre as correntes terminais, e comparando com um valor de referência pré-estabelecido. As correntes terminais, em operação normal, são iguais em regime permanente ou quando a rede é representada de forma estática (como é o caso da modelagem do Anatem).
Para modelar este relé no Anatem, poucos blocos são necessários, sendo um processo simples.
Considerando as definições de componentes de um sep, podemos definir os seguintes componentes deste relé:
Sensores: blocos IMPORT com subtipo ILINR e ILINI deverão ser empregados. Serão necessários 4 blocos, considerando os dois terminais. Um bloco IMPORT com subtipo STCIRC se faz necessário para a modelagem da lógica de manual override.
Atuadores: blocos EXPORT com subtipo STLIND e STLINP deverão ser empregados.
Malha inibidora: a princípio, este relé está sendo modelado para sempre estar monitorando o circuito. A única contribuição inibidora será devido à lógica do manual override.
Malha atuadora: serão utilizados alguns blocos aritméticos, lógicos e um bloco temporizador (DISMAX).
Locais remotos: dois locais são necessários, um para cada extremidade do circuito.
Locais remotos
Antes da definição dos relés, é apropriado definir os locais remotos (código DLOC). No caso, será utilizado um código com tipo CIRCAC, sendo necessário definir um local remoto para cada extremidade do circuito.
1DLOC
2(Lc) (Tipo)( El )( Pa)Nc( Ex)Gr(Bl)
304 CIRCAC 7 8 1 7
405 CIRCAC 7 8 1 8
5999999
Note que, no código Anatem não é necessário que os locais tenham sido definidos antes da declaração do CDU (DCDU ou ACDU) ou então de sua associação (DCNE). O DLOC deve aparecer antes do primeiro código EXSI ou outro código de simulação. A definição do local remoto antes do restante do CDU, neste tutorial, se dá para uma melhor compreensão do controlador. Na prática, normalmente, os códigos DLOC sucedem o código DCDU.
Modelagem dos sensores
A definição dos sensores é bastante simples, consistindo dos blocos IMPORT.
1DCDU
2(ncdu) ( nome cdu )
3 904 Relé Diferencial com temporização fixa
4(EFPAR (npar) ( valpar )
5DEFPAR #LOC1 04 primeira extremidade do circuito
6DEFPAR #LOC2 05 segunda extremidade do circuito
7(...)
8(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax)
90001 IMPORT ILINR I1R #LOC1 0
100002 IMPORT ILINI I1I #LOC1 0
110003 IMPORT ILINR I2R #LOC2 0
120004 IMPORT ILINI I2I #LOC2 0
13(...)
140014 IMPORT STCIRC SLIN #LOC1 0
15(...)
16FIMCDU
17999999
Os blocos 1 a 4 serão utilizados para a modelagem da malha atuadora. O bloco 14 será utilizado para a modelagem do manual override. O preenchimento do parâmetro P1 é obrigatório em função deste controlador ser associado por DCNE. O parâmetro P2 é opcional, mas recomendado. No caso, na ausência desses locais remotos, o valor 0 será lido para todos os sensores. Na prática, esse controlador não tem efeito sob o sistema quando, por algum motivo, o circuito associado não existe no caso; mas não apresentará erro de interface.
Modelagem dos atuadores
Os atuadores consistem no controle dos estados DE e PARA do circuito em questão. Não é possível controlar a variável STCIRC por meio de bloco EXPORT, sendo necessário o controle de ambas as extremidades.
1DCDU
2(ncdu) ( nome cdu )
3 904 Relé Diferencial com temporização fixa
4(EFPAR (npar) ( valpar )
5DEFPAR #LOC1 04 primeira extremidade do circuito
6(...)
7(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax)
80016 EXPORT STLIND EstL #LOC1
90017 EXPORT STLINP EstL #LOC1
10(...)
11FIMCDU
12999999
Atenção
Os terminais DE e PARA do local remoto são referentes à extremidade informada no código DLOC.
Modelagem da malha atuadora
A malha atuadora pode ser separada em duas partes. Na primeira, é feita a avaliação numérica das correntes terminais. Na segunda parte, o resultado dessa corrente diferencial é comparado com uma referência e então temporizada para atuação.
Conforme visto anteriormente, uma proteção pode ter dois tipos de temporização:
Temporização com drop-out: temporização necessária para a emissão de um sinal. Enquanto não é emitido o sinal, a entrada pode alterar o seu nível lógico e o controle pode ser dessensibilizado, reiniciando o processo de contagem. Os blocos DISMAX, DISMIN, DLAYON, DLAYOF, MONEST, CURVA modelam esse tipo de temporização.
Temporização sem drop-out: latência de comunicação. Esta temporização representa apenas um atraso de comunicação, não tendo seu comportamento alterado em função da variação da entrada. O bloco ATRASO modela esse tipo de temporização. Utilize blocos BORDAI e ACUM para fazer a conversão do sinal de pulsante para patamar e vice-versa, se necessário.
No caso, não será modelado a latência de comunicação entre o comando do relé e abertura do disjuntor, então não será preciso a utilização do bloco ATRASO nem de outros blocos auxiliares.
1DCDU
2(ncdu) ( nome cdu )
3 904 Relé Diferencial com temporização fixa
4(EFPAR (npar) ( valpar )
5DEFPAR #Imax 1.0 ajuste do relé
6DEFPAR #Tviol 0.10 temporização do relé + disjuntor
7DEFPAR #Tpers 0.
8(Tpers não faz diferença para o caso. Quando desligar a linha, ela permanecerá
9(desligada por toda a simulação.
10(...)
11(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax)
120006 SOMA I1R DifR
13 I2R DifR
140007 SOMA I1I DifI
15 I2I DifI
160008 FUNCAO X**2 DifR DifR2
170009 FUNCAO X**2 DifI DifI2
180010 SOMA DifR2 Dif2
19 DifI2 Dif2
200011 FUNCAO SQRT Dif2 Idif
21(...)
220012 DISMAX Idif Commd #Imax #Tviol#Tpers
230013 LOGIC .NOT. Commd Sai
24(...)
25FIMCDU
26999999
Note que o sentido da corrente esperado é em função da extremidade definida no código DLOC, considerando o sentido EX -> Outra Extremidade. Desta forma, não é necessário subtrair as correntes, mas somá-las.
Modelagem do manual override
O manual override tem como função permitir que o usuário consiga sobrepor seus comandos em relação aos definidos pelo controle. Para esta proteção simples, basta a importação do subtipo STCIRC junto de uma lógica .AND. com o comando da malha atuadora. Desta forma, um dos dois sinais passando para o estado lógico 0 (desligado), alterará, pelo CDU, o estado operativo do circuito. Uma vez desabilitado, o circuito não retorna à operação, a menos que o usuário intervenha com um comando para religá-lo, permitindo testes de religamento tripolar.
1DCDU
2(ncdu) ( nome cdu )
3 904 Relé Diferencial com temporização fixa
4(EFPAR (npar) ( valpar )
5DEFPAR #LOC1 04
6(...)
7(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax)
80014 IMPORT STCIRC SLIN #LOC1
90015 LOGIC .AND. SLIN EstL
10 Sai EstL
11(...)
12FIMCDU
13999999
Associação da proteção ao caso
Para associar um controlador de um sistema especial ou de uma proteção simples ao caso, utilize o código DCNE, mesmo que esta proteção se refira a outros equipamentos que possuem códigos de associação próprios, como máquinas síncronas ou conversores CC.
1DCNE
2(Nc) ( Mc )u
3 904 904u
4999999
Diagrama final do controle
A figura a seguir ilustra o diagrama completo do relé diferencial utilizado neste tutorial. Os blocos estão coloridos em função da sua contribuição para a proteção.
Verde: sensores
Laranja: malha atuadora
Vermelho: manual override / malha inibidora
Azul: atuadores
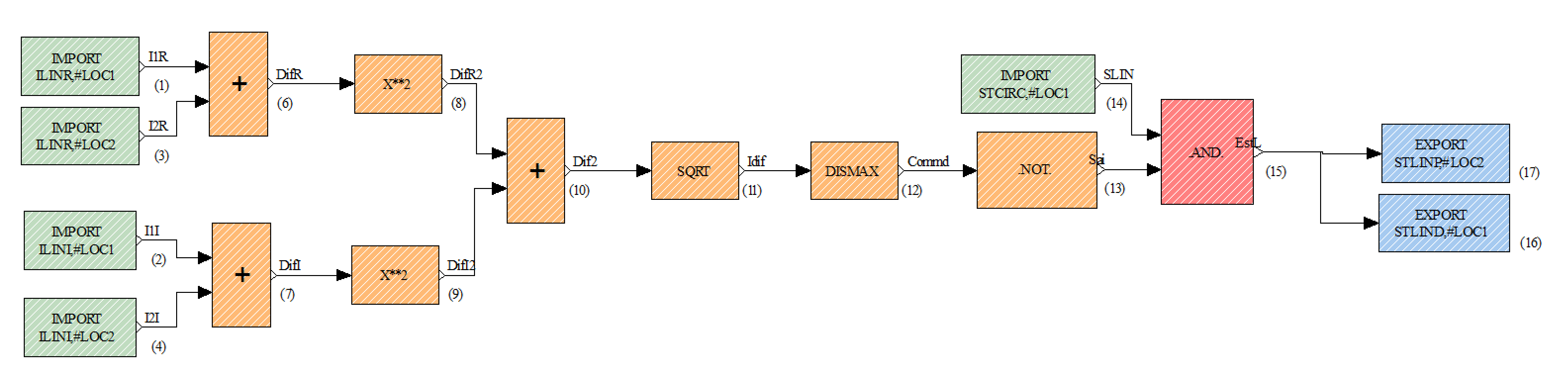
Fig. 94 Diagrama do relé diferencial¶